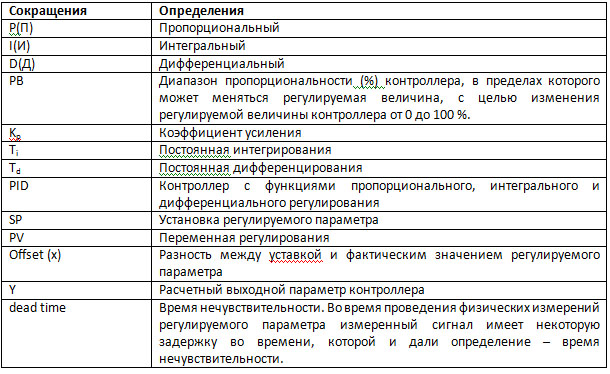
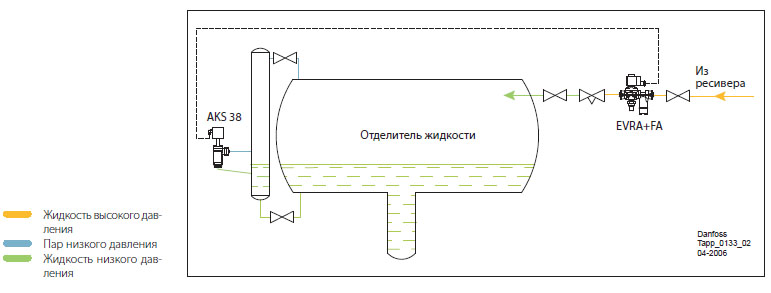
Двухпозиционное и плавное регулирование В данной таблице приведены основные сокращения, которые необходимо знать всем начинающим мастерам, у которых нет специального образования. Сокращения и определения ![]() Двухпозиционное (вкл/откл) регулирование В некоторых случаях для поддержания заданного параметра возникает потребность в использовании двухпозиционного регулирования. Это может быть вентиль или реле температуры, которое находится в двух положениях переключения (открытом/закрытом или замкнутом/разомкнутом состоянии). Используется двухпозиционное регулирование также в системах, в которых учтены принципы ПИД-регулирования. Так, в некоторых из них применяется двухпозиционный вентиль AKV/A, который регулирование перегрева хладагента осуществляет при помощи электронного ПИД-регулятора. В свою очередь регулятор действует в пределах диапазона, ограниченного минимальным и максимальным значением. К основным преимуществам двухпозиционных регуляторов следует отнести: незначительное изменение регулируемого параметра, простоту конструкции, отсутствие контура обратной связи и доступную стоимость. Рассмотрим пример двухпозиционного регулирования С целью поддержания уровня жидкости в пределах между максимальным и минимальным значением используем двухпозиционный регулятор AKS 38. Он имеет вид поплавкового реле, управлением которого занимается двухпозиционные поплавковые вентили. ![]() Плавное регулирование В отличие от систем двухпозиционного регулирования системы плавного регулирования более восприимчивы к изменениям регулируемой величины. Здесь при помощи электронных регуляторов (контроллеров) можно менять законы регулирования (пропорциональный, дифференциальный и интегральный), что делает их более универсальными, и позволяет использовать в различных схемах регулирования. Основные правила регулирования, согласно которым можно менять следующие параметры: - В П-контроллерах меняются параметры РВ и Kp;
- вПИ-контроллерах параметры РВ или Kp и Td;
- в ПИД-контроллерах параметры Kp Ti и Td.
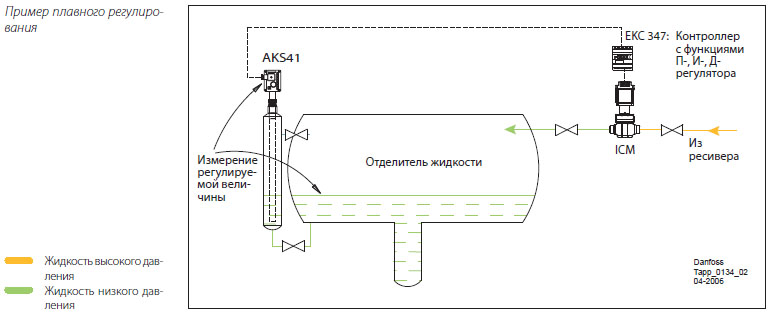
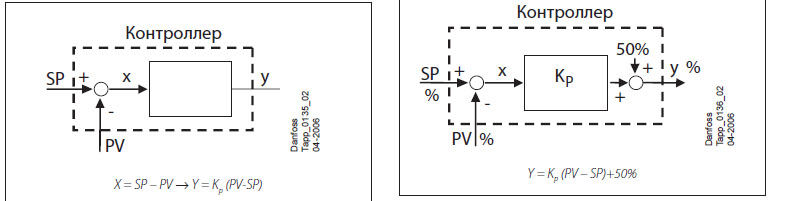
![]() П-контроллер Любой П-контроллер наделен свойствами пропорционального регулятора. В нем предусмотрена линейная зависимость между входными и выходными параметрами. Он спроектирован таким образом, что при условии SP=PV выходной сигнал от контроллера будет равен номинальной тепловой нагрузке на систему, то есть 50% от максимального выходного сигнала. В любом рассматриваемом примере следует учитывать отклонение регулируемой величины – разность SP и PV. С ней П-контроллер справиться не может, поскольку данная погрешность является результатом программирования самого устройства. Основным условием для создания минимального отклонения является то, чтобы регулирующее устройство было чувствительным к отклонениям регулируемой величины, а выходной параметр контроллера обеспечивал снятие средней тепловой нагрузки. При выполнении данного условия отклонение будет минимальным в любой момент, а в скором времени вообще приблизится к нулю. ![]() Характеристики П-контроллера Основной характеристикой П-контроллера является его следование пропорциональному закону регулирования. При пропорциональном регулировании создается отклонение, которое может быть незначительным и невероятно большим. Но, не смотря на это, лучше использовать пропорциональное регулирования, чем обходиться без него. Существует два варианта изменения диапазона пропорциональности РВ: - при увеличении РВ произойдет смещение регулируемой величины, а тенденция к колебаниям снизится;
- увеличение РВ уменьшит смещение регулируемой величины (реакция на изменение тепловой нагрузки улучшится), а тенденция к колебаниям увеличится.
И-контроллер Главным отличием И-контроллера является способность устранять отклонение регулируемой величины согласно уставки. Эта особенность ему присуща благодаря свойству менять выходной сигнал до устранения отклонения. Вместе с этим способность И-контроллера менять отклонение имеет и негативную сторону, поскольку увеличивается тенденция колебаниям регулируемой величины. В И-контроллерах умение нейтрализовать изменение тепловой нагрузки выражено слабее, а тенденция к колебаниям регулируемой величины сильнее, чем в П-контроллерах. ПИ-конгтроллеры Пи-контроллер создавался на основе изученных недостатков П- и И- контроллеров. В них имеется возможность менять параметры РВ и Ti. При изменении параметра Ti следует выбирать между стабильностью процесса и устранением отклонений. Снижение данной величины в свою очередь станет причиной снижения отклонения, при этом повысив склонность к колебаниям регулируемой величины. Д-контроллер Одной из самых важных особенностей Д-контроллера является его способность реагировать на изменение регулируемой величины. Вместе с этим, при появлении постоянного отклонения он не имеет возможности его устранить. Дифференциальная составляющая Д-контроллера стимулирует систему реагировать быстрее на изменение нагрузки, а также повышает устойчивость и реакцию системы. На отклонение это не оказывает какого-либо воздействия, но тенденция к колебаниям снижается. Контроллеры с дифференциальной составляющей быстрее реагируют на изменения тепловой нагрузки, что позволяет им быстрее сглаживать все параметры. В таких контроллерах предоставляется возможность изменять параметр Td. Его можно задавать в секундах или минутах, но не величина данного параметра не должна быть чрезмерно высокой, поскольку его воздействие при изменении уставки будет слишком большим. При запуске установки дифференциальную составляющую лучше исключить (Td=0). На практике для сглаживаний колебаний Д-контроллер не используют самостоятельно, а с ПД- или ПИД-регуляторами. ПИД-контроллеры Самыми большими преимуществами наделен ПИД-контроллер со всеми тремя составляющими, а именно: - интегральная составляющая, позволяющая устранять отклонения (ее повышение быстро снижает отклонение);
- интегральная составляющая повышает тенденцию к колебаниям;
- повышение диапазона пропорциональности РВ, снижающее отклонение, но уменьшающее устойчивость.
Благодаря дифференциальной составляющей снижается тенденция к колебаниям, и процесс регулирования становится быстрее. Вместе с этим повышение данного параметра (увеличение Td) свидетельствует о том, что контроллер будет чувствительным к случайным отклонениям, и контур управления станет нестабильным. |